|
|
--
Current content-based retrieval schemes for 3D models are based on
shape information only and typically ignore other clues like color
data associated to their description. Combining shape and color
clues can potentially improve 3D model retrieval performances but
this idea is still almost unexplored at this time. A possible
approach is to extend shape-based 3D model retrieval methods of
proven effectiveness in order to include color data. Following such
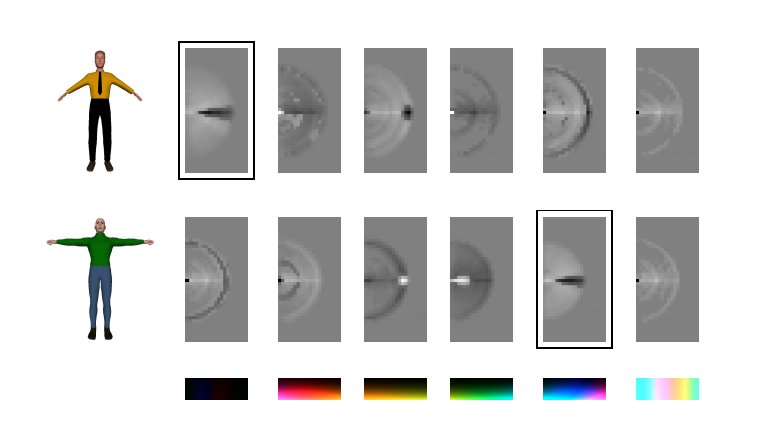
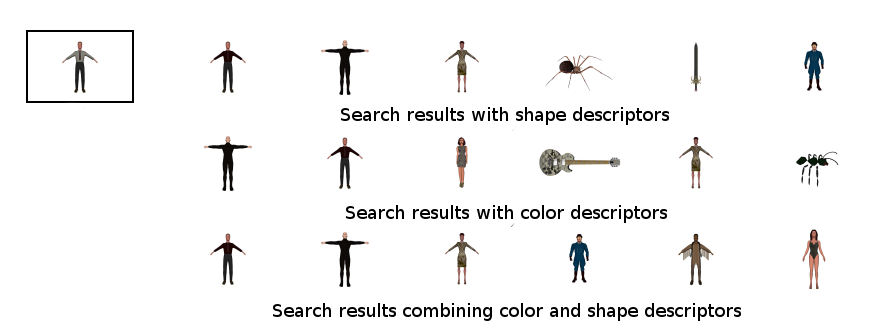
rationale we have introduced an extended version of the spin-image
descriptor that can account also for color data [1]. The comparison
of such descriptors is performed using a novel scheme that allows to
recognize as similar also objects with different colors but
distributed in the same way over the shape. Shape and color
similarity are finally combined together by an algorithm based on
fuzzy logic. Experimental results show how the joint use of color
and shape data allows to improve retrieval performances specially on
object classes with meaningful color information.
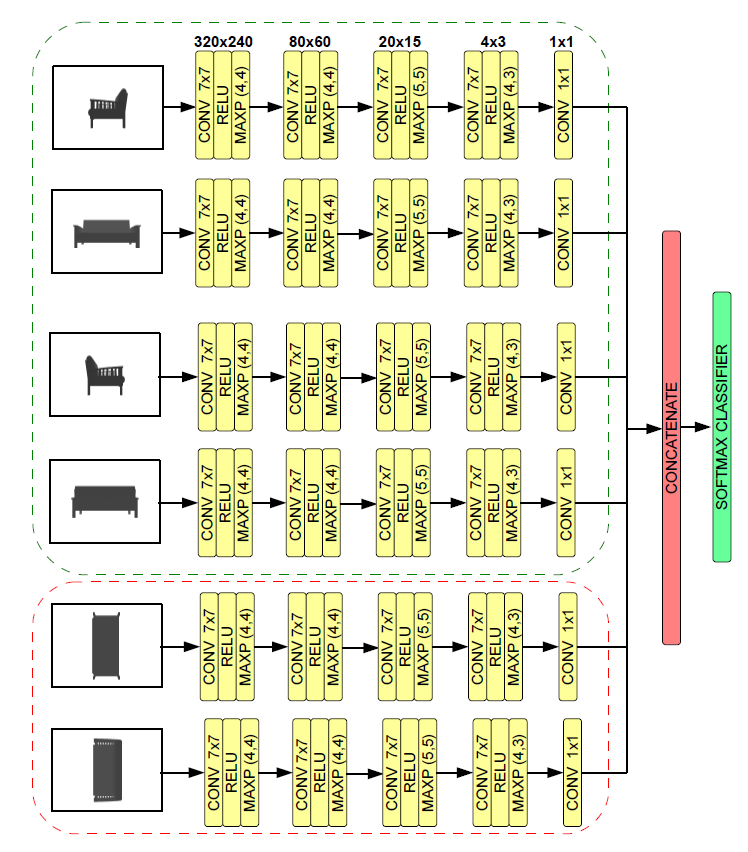
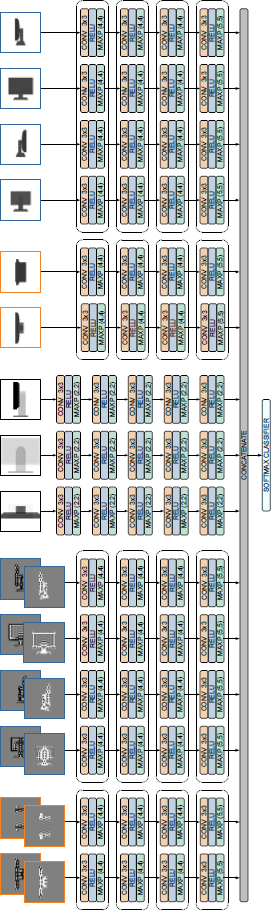
In the first version [2] the algorithm starts by extracting a set of depth maps by rendering the input 3D shape from different viewpoints. Then the depth maps are fed to a multi-branch Convolutional Neural Network (CNN). Each branch of the network takes in input one of the depth maps and produces a classification vector by using 5 convolutional layers of progressively reduced resolution. The various classification vectors are finally fed to a linear classifier that combines the outputs of the various branches and produces the final classification. Experimental results on the Princeton ModelNet database show how the proposed approach allows to obtain a high classification accuracy. A more refined version [3] exploits also surface and volumetric clues. It uses three different data representations: 1) a set of depth maps obtained by rendering the 3D object as in [2]; 2) a novel volumetric representation obtained by counting the number of filled voxels along each direction 3) NURBS surface curvature parameters. All the three data representations are fed to a multi-branch Convolutional Neural Network where each branch processes a different data source. The extracted feature vectors are fed to a linear classifier that combines the outputs in order to get the final predictions.
Related papers:
[3] L. Minto ,P. Zanuttigh, G. Pagnutti
|