 |
|
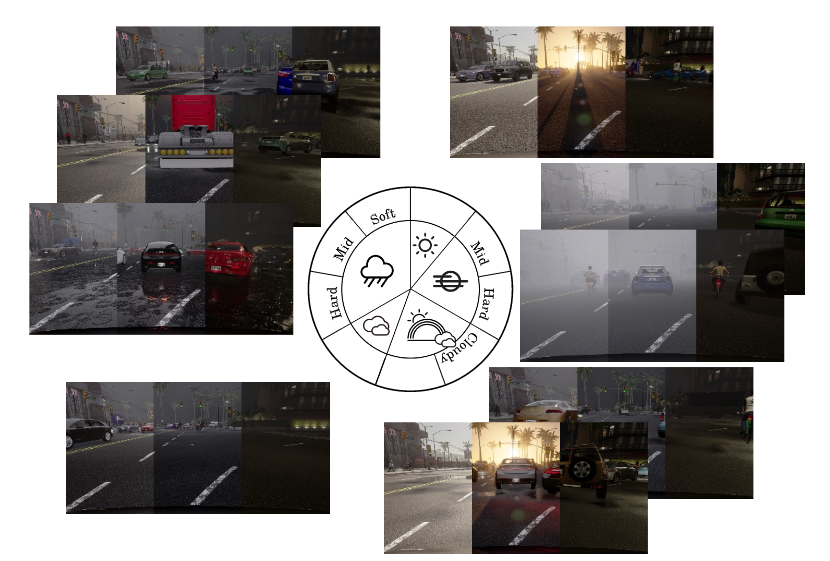
SELMA Dataset: SEmantic Large-scale Multimodal Acquisitions in Variable Weather, Daytime and Viewpoints
SELMA is a novel synthetic dataset for semantic
segmentation in the autonomous driving context that contains more than 30K unique waypoints
acquired from 24 different sensors including RGB, depth, semantic cameras and LiDARs, in 27 different weather and daytime
conditions, for a total of more than 20M samples.
|